Манипуляционные роботы общего назначения: задачи и перспективы
В настоящее время робототехника достигла значительных успехов в выполнении простых задач, таких как приготовление пищи. Однако разработка универсальных роботов, способных выполнять разнообразные функции в реальных условиях, представляет собой более сложную задачу по сравнению с созданием автопилотов для транспортных средств. Это обусловлено необходимостью интеграции множества технологических решений и обеспечения высокой степени адаптивности и интеллекта роботов.
Принципы работы манипуляционных роботов
Существует несколько основных типов манипуляционных роботов, каждый из которых обладает своими уникальными характеристиками:
-
Роботы с присосками: Эти устройства способны захватывать различные объекты, но могут испытывать затруднения при работе с тяжёлыми или пористыми материалами.
-
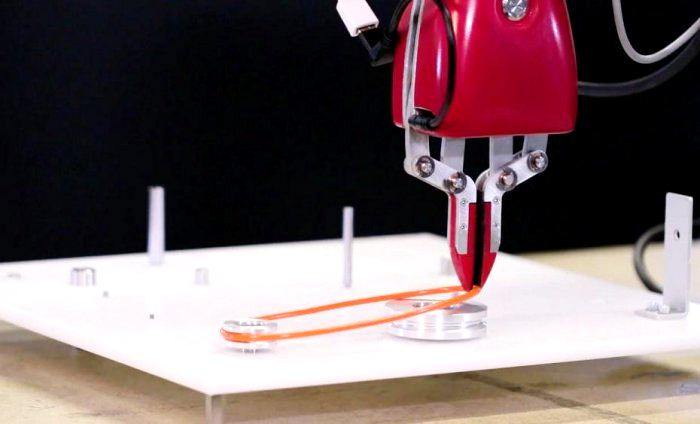
Роботы с механическими захватами: Они характеризуются высокой точностью и силой, однако требуют аккуратного обращения и не приспособлены к неожиданным изменениям в окружающей среде.
-
Мягкие роботы: Эти системы обладают высокой гибкостью и способностью адаптироваться к различным формам объектов, но их точность может быть ограничена.
Пути повышения эффективности роботов
Для создания универсальных роботов, способных выполнять широкий спектр задач, необходимо интегрировать различные технологии. Например, можно разработать гибридную систему, включающую элементы как с присосками, так и с механическими захватами, которая будет автоматически выбирать наиболее подходящий метод захвата в зависимости от условий. Также перспективным направлением является разработка механизмов регулировки силы захвата, что позволит роботам более точно и аккуратно обращаться с хрупкими объектами.
Перспективы развития робототехники
Современные исследования в области робототехники направлены на разработку новых датчиков и алгоритмов, обеспечивающих высокую точность определения местоположения объектов и адаптацию роботов к различным условиям окружающей среды. Это позволяет создавать более интеллектуальные системы, способные выполнять сложные задачи в динамических условиях.
Тем не менее, для широкого внедрения манипуляционных роботов в производственные процессы требуются значительные инвестиции и временные ресурсы. Однако в долгосрочной перспективе такие системы могут значительно повысить эффективность производственных линий и оптимизировать выполнение рутинных задач в различных отраслях, включая логистику, здравоохранение и офисное пространство.
Области применения манипуляционных роботов
На сегодняшний день манипуляционные роботы уже активно используются в различных сферах деятельности:
-
В логистике и складском хозяйстве они применяются для автоматизации процессов загрузки и разгрузки грузов.
-
В медицинских учреждениях роботы могут использоваться для поддержки врачей, например, при подаче инструментов.
-
В офисных помещениях они способны выполнять рутинные задачи, освобождая сотрудников от монотонной работы.
Заключение
Разработка универсальных манипуляционных роботов представляет собой важное направление научно-технического прогресса, которое имеет потенциал существенно изменить подходы к организации производства и выполнению повседневных задач. Внедрение таких систем может повысить эффективность рабочих процессов, улучшить качество продукции и создать новые возможности для оптимизации труда.