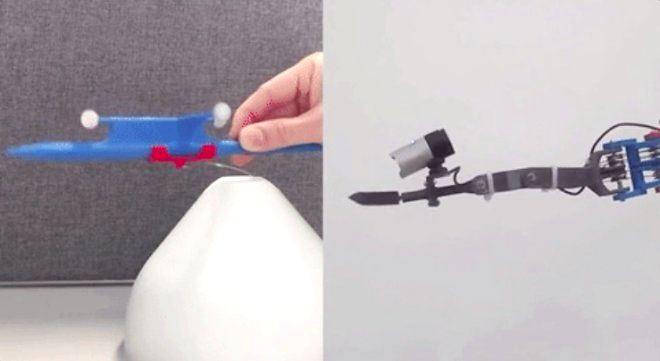
Исследователи из Университета Бристоля (Великобритания), Янис Штольценвальд и Валерио Майоль-Куэвас, разработали систему дистанционного управления роботом-манипулятором. Данная система предназначена для обеспечения возможности высококвалифицированному специалисту обучать менее опытного коллегу, находящегося на значительном удалении.
Принцип работы системы заключается в следующем: робот-манипулятор, оснащённый камерой и возможностью движения в различных направлениях, управляется местным оператором, выполняющим ремонтные работы в водопроводных системах. Затем управление передаётся удалённому оператору, обладающему более высоким уровнем квалификации. Местному оператору необходимо лишь наблюдать за действиями удалённого оператора и повторять их.
В ходе экспериментов учёные установили, что использование дистанционно управляемого робота повышает эффективность выполнения задач на 24%.
В перспективе Янис Штольценвальд и Валерио Майоль-Куэвас планируют адаптировать разработанную систему для применения в реальных условиях. Целью дальнейших исследований является оценка экономической и практической целесообразности использования данной системы, особенно в контексте образовательных процессов.